As an Embedded Computing class project, we designed our own PID control system programmed in C using Eclipse to tune a motor to a user input desired velocity. Using MatLAB, we compared our PID controller against theoretical simulations to analyze their system accuracy.
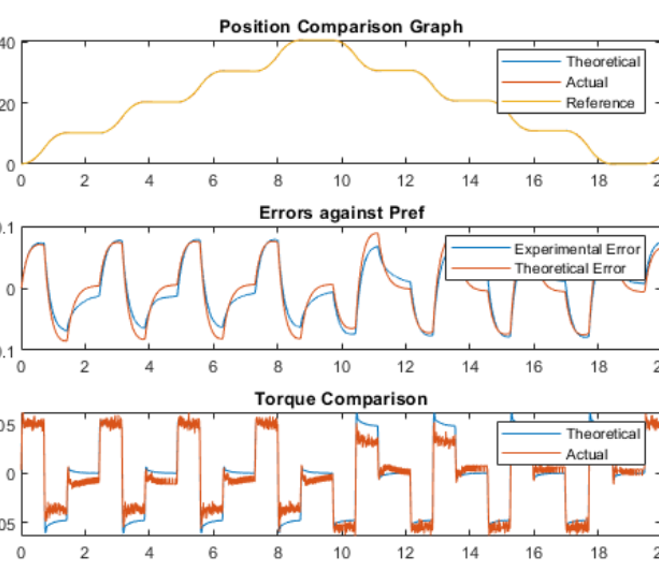
Comparison of our theoretical and actual data
Utilize oscilloscope along with integrating other components such as keypads and LCD screens