At Dexterity, I first worked on designing end effector grippers and accompanying dress pack to pick different types of packages. I deployed and supported two different grippers in the field, including writing support documentation and working with onsite personnel.
I more recently worked on different modules in our mobile roving robot base focused on packaging off-the-shelf components. The modules I led include an electronic power enclosure, 3D camera fixtures and a prototype drive train controller.

Vacuum suction and pneumatic grip combination gripper

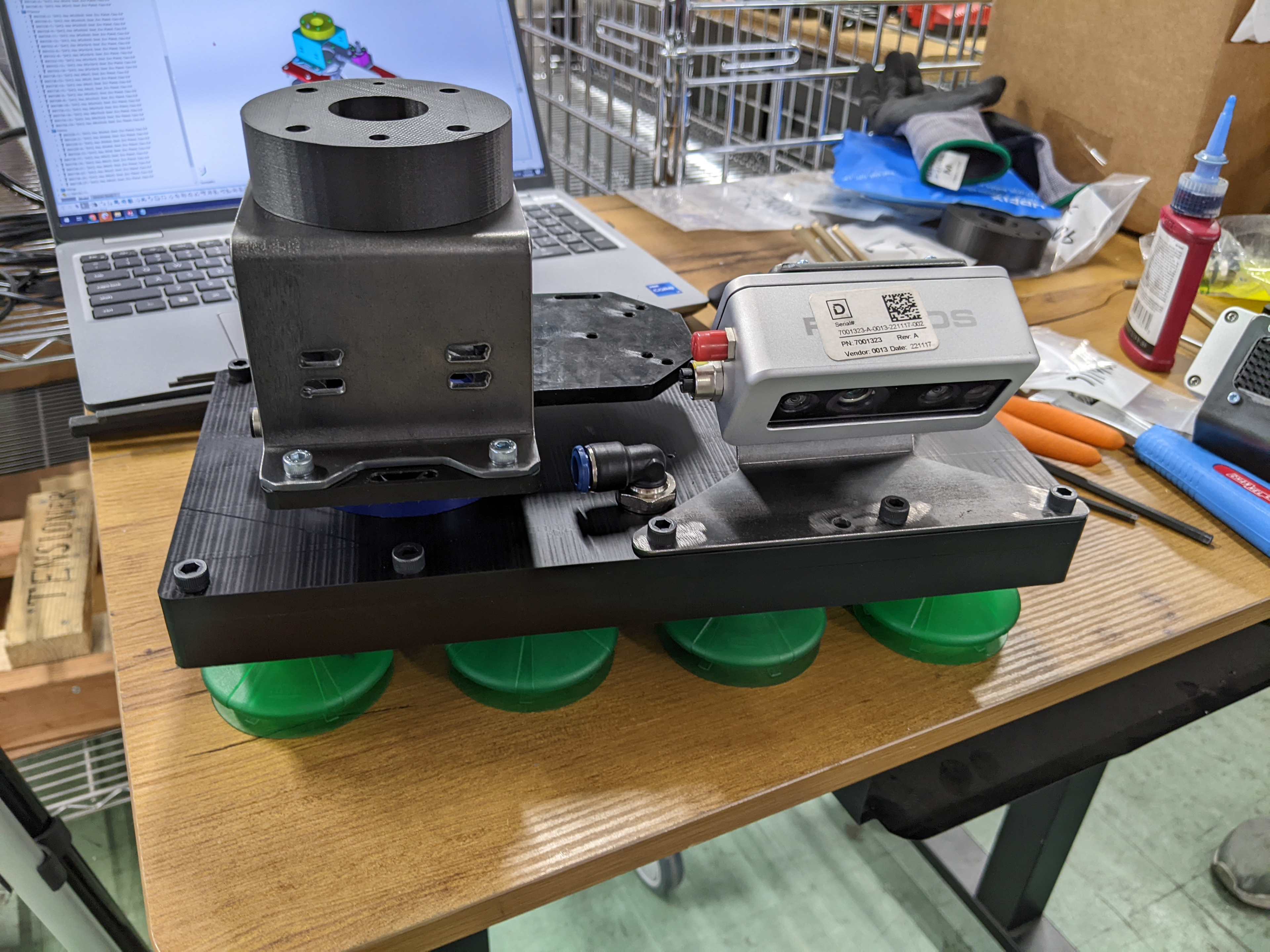
Prototype gripper diagnostics test jig
Suction gripper prototype
